.
In physics, a frame of reference (or reference frame) consists of an abstract coordinate system and the set of physical reference points that uniquely fix (locate and orient) the coordinate system and standardize measurements.
A frame of reference is defined as the system that forms the basis of the measurements of space and other dimensions. In our frame of reference we measure space in terms of the extensions of matter. Other dimensions also use matter as their basis. This has been the frame of reference used by all scientists from antiquity until now, including Newton and Einstein. We may refer to it as the material reference frame (MRF).
The MRF cannot account for the dimensions of a substance, such as field, which is not matter. Field is the substance that fills the “empty space”. Field is not as substantive, and its space is not as compact, as that of matter, but it is a substance that communicates forces among material objects. The presence of field resolves the uneasiness that Newton felt about “action at a distance”.
The field increases in substantive-ness as frequency increases in the electromagnetic spectrum. At the upper limit of frequency, the field approaches the substantive-ness of matter. To account for this property of substantive-ness we need a broader frame of reference. We may refer to it as the field reference frame (FRF).
In n dimensions, n+1 reference points are sufficient to fully define a reference frame. Using rectangular (Cartesian) coordinates, a reference frame may be defined with a reference point at the origin and a reference point at one unit distance along each of the n coordinate axes.
The FRF then consists of a new dimension of substantive-ness which was not there in the MRF. As substance becomes more substantial its inherent resistance to change increases. This property is already known as inertia. Substantive-ness, however, refers to a level of inertia, and not to the quantity of inertia measured as mass. We may therefore define the substantive-ness of substance as its “level of inertia”. It measures how substantial a substance is.
In Einsteinian relativity, reference frames are used to specify the relationship between a moving observer and the phenomenon or phenomena under observation. In this context, the phrase often becomes “observational frame of reference” (or “observational reference frame”), which implies that the observer is at rest in the frame, although not necessarily located at its origin. A relativistic reference frame includes (or implies) the coordinate time, which does not correspond across different frames moving relatively to each other. The situation thus differs from Galilean relativity, where all possible coordinate times are essentially equivalent.
The Einsteinian relativity essentially describes change in the inertia of MRF relative to the inertia of light. The drift velocity is simply an indicator of inertia. The closer is the drift velocity of MRF is to that of light, the lower is its inertia. The duration of the substance decreases with inertia. This is change in the characteristic of time. With decrease in inertia space becomes less compact and time becomes less durable. For Einstein’s MRF the common reference point is the “velocity” of light. The time coordinates essentially refer to inertia. They are different to the degree v/c ratios are different.
Different aspects of “frame of reference”
The need to distinguish between the various meanings of “frame of reference” has led to a variety of terms. For example, sometimes the type of coordinate system is attached as a modifier, as in Cartesian frame of reference. Sometimes the state of motion is emphasized, as in rotating frame of reference. Sometimes the way it transforms to frames considered as related is emphasized as in Galilean frame of reference. Sometimes frames are distinguished by the scale of their observations, as in macroscopic and microscopic frames of reference.
- Cartesian frame of reference—emphasizes origin and independent coordinates
- Rotating frame of reference—emphasizes the rotation of the frame of reference
- Galilean frame of reference—emphasizes the frequency related to matter
- Macroscopic/microscopic frames—emphasize the scope or condition for the reference frame
In this article, the term observational frame of reference is used when emphasis is upon the state of motion rather than upon the coordinate choice or the character of the observations or observational apparatus. In this sense, an observational frame of reference allows study of the effect of motion upon an entire family of coordinate systems that could be attached to this frame. On the other hand, a coordinate system may be employed for many purposes where the state of motion is not the primary concern. For example, a coordinate system may be adopted to take advantage of the symmetry of a system. In a still broader perspective, the formulation of many problems in physics employs generalized coordinates, normal modes or eigenvectors, which are only indirectly related to space and time.
The observational frame of reference emphasizes the state of motion relative to the motion of light. Other frames of reference may emphasize symmetry, generalized coordinates, normal modes or eigenvectors.
It seems useful to divorce the various aspects of a reference frame for the discussion below. We therefore take observational frames of reference, coordinate systems, and observational equipment as independent concepts, separated as below:
- An observational frame (such as an inertial frame or non-inertial frame of reference) is a physical concept related to state of motion.
The observational frame of reference takes levels of inertia into account.
- A coordinate system is a mathematical concept, amounting to a choice of language used to describe observations. Consequently, an observer in an observational frame of reference can choose to employ any coordinate system (Cartesian, polar, curvilinear, generalized, …) to describe observations made from that frame of reference. A change in the choice of this coordinate system does not change an observer’s state of motion, and so does not entail a change in the observer’s observational frame of reference. This viewpoint can be found elsewhere as well. Which is not to dispute that some coordinate systems may be a better choice for some observations than are others.
A frame of reference is basically a system to measure space and other dimensions. Different coordinate system lead to the same final result with respect to space, motion and inertia. Here time is basically a parameter for motion and inertia.
- Choice of what to measure and with what observational apparatus is a matter separate from the observer’s state of motion and choice of coordinate system.
In the theory of relativity the “motion of the observer relative to speed of light” essentially provides a measure of inertia relative to the inertia of light.
Here is a quotation applicable to moving observational frames Ꞧ and various associated Euclidean three-space coordinate systems [R, R′, etc.]:
“We first introduce the notion of reference frame, itself related to the idea of observer: the reference frame is, in some sense, the “Euclidean space carried by the observer”. Let us give a more mathematical definition:… the reference frame is… the set of all points in the Euclidean space with the rigid body motion of the observer. The frame, denoted Ꞧ, is said to move with the observer.… The spatial positions of particles are labelled relative to a frame Ꞧ by establishing a coordinate system R with origin O. The corresponding set of axes, sharing the rigid body motion of the frame Ꞧ, can be considered to give a physical realization of Ꞧ. In a frame Ꞧ, coordinates are changed from R to R′ by carrying out, at each instant of time, the same coordinate transformation on the components of intrinsic objects (vectors and tensors) introduced to represent physical quantities in this frame.
and this on the utility of separating the notions of Ꞧ and [R, R′, etc.]:
“As noted by Brillouin, a distinction between mathematical sets of coordinates and physical frames of reference must be made. The ignorance of such distinction is the source of much confusion… the dependent functions such as velocity for example, are measured with respect to a physical reference frame, but one is free to choose any mathematical coordinate system in which the equations are specified.”
and this, also on the distinction between Ꞧ and [R, R′, etc.]:
“The idea of a reference frame is really quite different from that of a coordinate system. Frames differ just when they define different spaces (sets of rest points) or times (sets of simultaneous events). So the ideas of a space, a time, of rest and simultaneity, go inextricably together with that of frame. However, a mere shift of origin, or a purely spatial rotation of space coordinates results in a new coordinate system. So frames correspond at best to classes of coordinate systems.”
and from J. D. Norton:
“In traditional developments of special and general relativity it has been customary not to distinguish between two quite distinct ideas. The first is the notion of a coordinate system, understood simply as the smooth, invertible assignment of four numbers to events in spacetime neighborhoods. The second, the frame of reference, refers to an idealized system used to assign such numbers … To avoid unnecessary restrictions, we can divorce this arrangement from metrical notions. … Of special importance for our purposes is that each frame of reference has a definite state of motion at each event of spacetime.…Within the context of special relativity and as long as we restrict ourselves to frames of reference in inertial motion, then little of importance depends on the difference between an inertial frame of reference and the inertial coordinate system it induces. This comfortable circumstance ceases immediately once we begin to consider frames of reference in non-uniform motion even within special relativity.…More recently, to negotiate the obvious ambiguities of Einstein’s treatment, the notion of frame of reference has reappeared as a structure distinct from a coordinate system.”
The discussion is taken beyond simple space-time coordinate systems by Brading and Castellani. Extension to coordinate systems using generalized coordinates underlies the Hamiltonian and Lagrangian formulations of quantum field theory, classical relativistic mechanics, and quantum gravity.
In the observational reference frame, space is moving with the frame. This is like treating space as the “extension of the moving object”. The space is considered as rigid as the object in terms of inertia. No other properties of matter are being considered.
The reference frame forms a physical basis of measurement independent of the mathematical coordinate system. The observation reference frame is physically in motion and is subject to changes in inertia. As motion increase, inertia reduces. The coordinate system, on the other hand, simply defines mathematically the position within that frame of reference.
Thus the velocity of the observational reference frame introduces a new dimension of inertia to the frame of reference. The dimension of observer is, in fact, the dimension of inertia.
Coordinate systems
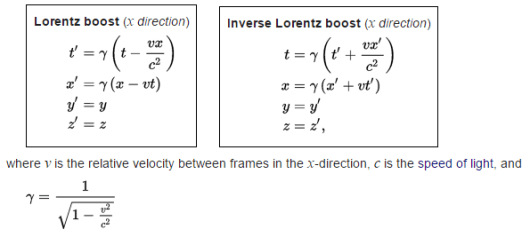
As is apparent from these remarks, a coordinate system is a mathematical construct, part of an axiomatic system. There is no necessary connection between coordinate systems and physical motion (or any other aspect of reality). However, coordinate systems can include time as a coordinate, and can be used to describe motion. Thus, Lorentz transformations and Galilean transformations may be viewed as coordinate transformations.
Similarly, coordinate systems can include “inertia” as a coordinate to describe the motion of “space”.
Observational frames of reference
An observational frame of reference, often referred to as a physical frame of reference, a frame of reference, or simply a frame, is a physical concept related to an observer and the observer’s state of motion. Here we adopt the view expressed by Kumar and Barve: an observational frame of reference is characterized only by its state of motion. However, there is lack of unanimity on this point. In special relativity, the distinction is sometimes made between an observer and a frame. According to this view, a frame is an observer plus a coordinate lattice constructed to be an orthonormal right-handed set of space-like vectors perpendicular to a time-like vector. See Doran. This restricted view is not used here, and is not universally adopted even in discussions of relativity. In general relativity the use of general coordinate systems is common (see, for example, the Schwarzschild solution for the gravitational field outside an isolated sphere).
If we add the dimension of inertia to Newton’s “inertial” frame of reference then we get Einstein’s “Observational” frame of reference. The “speed of observer” represents the dimension of inertia. It is really the “drift velocity” that is an indicator of the inertia of the system that is drifting.
There are two types of observational reference frame: inertial and non-inertial. An inertial frame of reference is defined as one in which all laws of physics take on their simplest form. In special relativity these frames are related by Lorentz transformations, which are parametrized by rapidity. In Newtonian mechanics, a more restricted definition requires only that Newton’s first law holds true; that is, a Newtonian inertial frame is one in which a free particle travels in a straight line at constant speed, or is at rest. These frames are related by Galilean transformations. These relativistic and Newtonian transformations are expressed in spaces of general dimension in terms of representations of the Poincaré group and of the Galilean group.
The observational frame of reference acts as the “inertial” frame of reference that extends to different levels of inertia. A “non-inertial” frame then addresses the transition between different levels of inertia.
In contrast to the inertial frame, a non-inertial frame of reference is one in which fictitious forces must be invoked to explain observations. An example is an observational frame of reference centered at a point on the Earth’s surface. This frame of reference orbits around the center of the Earth, which introduces the fictitious forces known as the Coriolis force, centrifugal force, and gravitational force. (All of these forces including gravity disappear in a truly inertial reference frame, which is one of free-fall.)
The fictitious forces actually represent a change in inertia of the system that is accelerating.
Measurement apparatus
A further aspect of a frame of reference is the role of the measurement apparatus (for example, clocks and rods) attached to the frame (see Norton quote above). This question is not addressed in this article, and is of particular interest in quantum mechanics, where the relation between observer and measurement is still under discussion (see measurement problem).
Space and time is influenced by the dimension of inertia. The problem of “clocks and rods” is handled when the dimension of inertia is explicitly added to the frame of reference.
In physics experiments, the frame of reference in which the laboratory measurement devices are at rest is usually referred to as the laboratory frame or simply “lab frame.” An example would be the frame in which the detectors for a particle accelerator are at rest. The lab frame in some experiments is an inertial frame, but it is not required to be (for example the laboratory on the surface of the Earth in many physics experiments is not inertial). In particle physics experiments, it is often useful to transform energies and momenta of particles from the lab frame where they are measured, to the center of momentum frame “COM frame” in which calculations are sometimes simplified, since potentially all kinetic energy still present in the COM frame may be used for making new particles.
The “lab frame” is the frame of reference in which the laboratory measurement devices are at rest. The “COM frame” is the center of momentum frame in which calculations are sometimes simplified.
In this connection it may be noted that the clocks and rods often used to describe observers’ measurement equipment in thought, in practice are replaced by a much more complicated and indirect metrology that is connected to the nature of the vacuum, and uses atomic clocks that operate according to the standard model and that must be corrected for gravitational time dilation. (See second, meter and kilogram).
In fact, Einstein felt that clocks and rods were merely expedient measuring devices and they should be replaced by more fundamental entities based upon, for example, atoms and molecules.
Einstein used clocks and rods to describe observers’ measurement equipment in thought. He felt that they should be replaced by more fundamental entities based upon, for example, atoms and molecules.
…
Examples of inertial frames of reference
…
Frames of reference are especially important in special relativity, because when a frame of reference is moving at some significant fraction of the speed of light, then the flow of time in that frame does not necessarily apply in another frame. The speed of light is considered to be the only true constant between moving frames of reference.
Remarks
It is important to note some assumptions made above about the various inertial frames of reference. Newton, for instance, employed universal time, as explained by the following example. Suppose that you own two clocks, which both tick at exactly the same rate. You synchronize them so that they both display exactly the same time. The two clocks are now separated and one clock is on a fast moving train, traveling at constant velocity towards the other. According to Newton, these two clocks will still tick at the same rate and will both show the same time. Newton says that the rate of time as measured in one frame of reference should be the same as the rate of time in another. That is, there exists a “universal” time and all other times in all other frames of reference will run at the same rate as this universal time irrespective of their position and velocity. This concept of time and simultaneity was later generalized by Einstein in his special theory of relativity (1905) where he developed transformations between inertial frames of reference based upon the universal nature of physical laws and their economy of expression (Lorentz transformations).
Newton’s ignores the changes in the inertia of an object due to changes in its “drift velocity” because such changes are infinitesimal in the material domain. Time is changed only by changes in inertia. Newton’s time is related to general level of inertia in the material domain. Einstein considered inertia and time beyond the material domain in the field domain.
It is also important to note that the definition of inertial reference frame can be extended beyond three-dimensional Euclidean space. Newton’s assumed a Euclidean space, but general relativity uses a more general geometry. As an example of why this is important, let us consider the geometry of an ellipsoid. In this geometry, a “free” particle is defined as one at rest or traveling at constant speed on a geodesic path. Two free particles may begin at the same point on the surface, traveling with the same constant speed in different directions. After a length of time, the two particles collide at the opposite side of the ellipsoid. Both “free” particles traveled with a constant speed, satisfying the definition that no forces were acting. No acceleration occurred and so Newton’s first law held true. This means that the particles were in inertial frames of reference. Since no forces were acting, it was the geometry of the situation which caused the two particles to meet each other again. In a similar way, it is now common to describe that we exist in a four-dimensional geometry known as spacetime. In this picture, the curvature of this 4D space is responsible for the way in which two bodies with mass are drawn together even if no forces are acting. This curvature of spacetime replaces the force known as gravity in Newtonian mechanics and special relativity.
Curvature of spacetime is one way of accounting for mass and gravity. The other way of accounting for it is through the property of inertia (substantive-ness of substance).
Non-inertial frames
Here the relation between inertial and non-inertial observational frames of reference is considered. The basic difference between these frames is the need in non-inertial frames for fictitious forces, as described below.
…
When there is accelerated motion due to a force being exerted there is manifestation of inertia. If an electric car designed to recharge its battery system when decelerating is switched to braking, the batteries are recharged, illustrating the physical strength of manifestation of inertia. However, the manifestation of inertia does not prevent acceleration (or deceleration), for manifestation of inertia occurs in response to change in velocity due to a force. Seen from the perspective of a rotating frame of reference the manifestation of inertia appears to exert a force (either in centrifugal direction, or in a direction orthogonal to an object’s motion, the Coriolis effect).
…
Whereas, the inertial frames have constant level of inertia, the inertial frames have changing inertia.
.