Here is morning meditation of March 24, 2017, that led to the realization on the subject of Space.
.
 Vinaire's Blog
Vinaire's BlogHere is morning meditation of March 24, 2017, that led to the realization on the subject of Space.
.
A quantum was, at first, proposed as a mathematical concept by Max Planck that explained the distribution of the Black body radiation. It was a groundbreaking concept in the sense that it expressed energy as a function of frequency instead of amplitude of the waveform.
Einstein, in his groundbreaking paper on Light quanta, was able to show that the entropy of monochromatic radiation follows the same rules as the entropy of a perfect gas. Einstein thus showed that Planck’s postulate of energy quanta was more than a mathematical device. Light quanta had actual substantiality like a gas molecule.
A quantum of light has substantiality. That indicates mass of certain concentration.
.
Newton’s corpuscular theory viewed light as having substance. The wave theory changed this view to light being energy of a wave traveling through a stationary aether. In wave theory the particles of medium oscillate about a stationary location and do not move with the wave. The energy of the wave is proportional to the square of the amplitude of the wave.
But this view encountered a major setback with Einstein’s theory of Light Quanta. Einstein showed that light approximated particle behavior, therefore, the medium of stationary aether was not required. The light energy was more like the kinetic energy of a particle—a function of mass and velocity. In the case of light, however, that “mass” was determined by a variable “frequency”.
The frequency of light represents a “mass concentration” that becomes denser as frequency increases.
.
A variable mass concentration based on frequency was a revolutionary concept, because matter has a constant mass concentration in terms of atoms. Einstein had difficulty in accepting the variability of mass concentration. He proposed a mass-energy equivalence as E = mc2 and declared quantum to be an “energy particle”. For Einstein, light did not have mass, because it did not have the same “mass concentration” as that in a material particle.
Einstein concludes in his 1905 paper on light quanta:
According to the assumption considered here, when a light ray starting from a point is propagated, the energy is not continuously distributed over an ever increasing volume, but it consists of a finite number of energy quanta, localized in space, which move without being divided and which can be absorbed or emitted only as a whole.
But a particle can be treated as discrete in space only when it can be viewed as a point particle. A material particle can be viewed as a point particle because its mass can be treated as being concentrated at a center. That is called the center of mass. The uncertainty principle essentially says that a quantum particle does not have a center of mass because its location cannot be pinned down. In other words, as particles are continued to be divided, they lose their center of mass beyond a certain limit, and they merge into each other forming a fluid-like continuum.
Einstein’s conclusion about discreteness of quanta was based on the assumption of “constant concentration of mass” Einstein did not become aware of the inconsistency of his assumption because he conflated energy with mass. It is true that quantum can have discrete energy interactions, and that the concentration of mass could be so low that its significance can be appreciated in energy units only. But it is also true that there can be no concept of energy without an underlying concept of substance.
Unlike matter, quanta has variable “mass concentration”. It is a fluid-like continuum with rapid intrinsic motion.
.
In matter, mass has a concentration that we find in a neutron or a proton. These particles have a certain volume, but they may be treated as point particles because of their center of mass property. This property arises because of their rigid structure.
Mass is 1840 times less concentrated in an electron that makes the size of the electron about 1840 times larger than the size of the proton. An electron is no longer rigid, it does not have the center of mass property and it flows like a fluid. An electron cannot be treated like a point particle.
Mass is still less concentrated in a photon, and its size may be considered much larger than an electron. It flows more like a fluid without center of mass. Richard Feynman, in his book QED: The Strange Theory of Light and Matter, shows calculations that treats light as such a fluid. Feynman, however, thinks of those calculated values as “probabilities” because he thought of photon as a “point particle”.
Matter, as it loses its rigidity of high concentration, becomes a field of much lesser mass concentration. The field does not have a center of mass. It is fluid with rapid motion. Field is not just a mathematical reality as considered by Maxwell and Einstein. This is an actual reality as visualized by Faraday with his lines of force. There is no limit to which the concentration of mass can be diluted as a field. The ultimate limit may be the gravitational field as “space”.
Current physics does not acknowledge the dimension of “mass” that exists at every location in space due to varying concentrations.
.

.
In physics, a frame of reference (or reference frame) consists of an abstract coordinate system and the set of physical reference points that uniquely fix (locate and orient) the coordinate system and standardize measurements.
A frame of reference is defined as the system that forms the basis of the measurements of space and other dimensions. In our frame of reference we measure space in terms of the extensions of matter. Other dimensions also use matter as their basis. This has been the frame of reference used by all scientists from antiquity until now, including Newton and Einstein. We may refer to it as the material reference frame (MRF).
The MRF cannot account for the dimensions of a substance, such as field, which is not matter. Field is the substance that fills the “empty space”. Field is not as substantive, and its space is not as compact, as that of matter, but it is a substance that communicates forces among material objects. The presence of field resolves the uneasiness that Newton felt about “action at a distance”.
The field increases in substantive-ness as frequency increases in the electromagnetic spectrum. At the upper limit of frequency, the field approaches the substantive-ness of matter. To account for this property of substantive-ness we need a broader frame of reference. We may refer to it as the field reference frame (FRF).
In n dimensions, n+1 reference points are sufficient to fully define a reference frame. Using rectangular (Cartesian) coordinates, a reference frame may be defined with a reference point at the origin and a reference point at one unit distance along each of the n coordinate axes.
The FRF then consists of a new dimension of substantive-ness which was not there in the MRF. As substance becomes more substantial its inherent resistance to change increases. This property is already known as inertia. Substantive-ness, however, refers to a level of inertia, and not to the quantity of inertia measured as mass. We may therefore define the substantive-ness of substance as its “level of inertia”. It measures how substantial a substance is.
In Einsteinian relativity, reference frames are used to specify the relationship between a moving observer and the phenomenon or phenomena under observation. In this context, the phrase often becomes “observational frame of reference” (or “observational reference frame”), which implies that the observer is at rest in the frame, although not necessarily located at its origin. A relativistic reference frame includes (or implies) the coordinate time, which does not correspond across different frames moving relatively to each other. The situation thus differs from Galilean relativity, where all possible coordinate times are essentially equivalent.
The Einsteinian relativity essentially describes change in the inertia of MRF relative to the inertia of light. The drift velocity is simply an indicator of inertia. The closer is the drift velocity of MRF is to that of light, the lower is its inertia. The duration of the substance decreases with inertia. This is change in the characteristic of time. With decrease in inertia space becomes less compact and time becomes less durable. For Einstein’s MRF the common reference point is the “velocity” of light. The time coordinates essentially refer to inertia. They are different to the degree v/c ratios are different.
The need to distinguish between the various meanings of “frame of reference” has led to a variety of terms. For example, sometimes the type of coordinate system is attached as a modifier, as in Cartesian frame of reference. Sometimes the state of motion is emphasized, as in rotating frame of reference. Sometimes the way it transforms to frames considered as related is emphasized as in Galilean frame of reference. Sometimes frames are distinguished by the scale of their observations, as in macroscopic and microscopic frames of reference.
In this article, the term observational frame of reference is used when emphasis is upon the state of motion rather than upon the coordinate choice or the character of the observations or observational apparatus. In this sense, an observational frame of reference allows study of the effect of motion upon an entire family of coordinate systems that could be attached to this frame. On the other hand, a coordinate system may be employed for many purposes where the state of motion is not the primary concern. For example, a coordinate system may be adopted to take advantage of the symmetry of a system. In a still broader perspective, the formulation of many problems in physics employs generalized coordinates, normal modes or eigenvectors, which are only indirectly related to space and time.
The observational frame of reference emphasizes the state of motion relative to the motion of light. Other frames of reference may emphasize symmetry, generalized coordinates, normal modes or eigenvectors.
It seems useful to divorce the various aspects of a reference frame for the discussion below. We therefore take observational frames of reference, coordinate systems, and observational equipment as independent concepts, separated as below:
The observational frame of reference takes levels of inertia into account.
A frame of reference is basically a system to measure space and other dimensions. Different coordinate system lead to the same final result with respect to space, motion and inertia. Here time is basically a parameter for motion and inertia.
In the theory of relativity the “motion of the observer relative to speed of light” essentially provides a measure of inertia relative to the inertia of light.
Here is a quotation applicable to moving observational frames Ꞧ and various associated Euclidean three-space coordinate systems [R, R′, etc.]:
and this on the utility of separating the notions of Ꞧ and [R, R′, etc.]:
and this, also on the distinction between Ꞧ and [R, R′, etc.]:
and from J. D. Norton:
The discussion is taken beyond simple space-time coordinate systems by Brading and Castellani. Extension to coordinate systems using generalized coordinates underlies the Hamiltonian and Lagrangian formulations of quantum field theory, classical relativistic mechanics, and quantum gravity.
In the observational reference frame, space is moving with the frame. This is like treating space as the “extension of the moving object”. The space is considered as rigid as the object in terms of inertia. No other properties of matter are being considered.
The reference frame forms a physical basis of measurement independent of the mathematical coordinate system. The observation reference frame is physically in motion and is subject to changes in inertia. As motion increase, inertia reduces. The coordinate system, on the other hand, simply defines mathematically the position within that frame of reference.
Thus the velocity of the observational reference frame introduces a new dimension of inertia to the frame of reference. The dimension of observer is, in fact, the dimension of inertia.
As is apparent from these remarks, a coordinate system is a mathematical construct, part of an axiomatic system. There is no necessary connection between coordinate systems and physical motion (or any other aspect of reality). However, coordinate systems can include time as a coordinate, and can be used to describe motion. Thus, Lorentz transformations and Galilean transformations may be viewed as coordinate transformations.
Similarly, coordinate systems can include “inertia” as a coordinate to describe the motion of “space”.
An observational frame of reference, often referred to as a physical frame of reference, a frame of reference, or simply a frame, is a physical concept related to an observer and the observer’s state of motion. Here we adopt the view expressed by Kumar and Barve: an observational frame of reference is characterized only by its state of motion. However, there is lack of unanimity on this point. In special relativity, the distinction is sometimes made between an observer and a frame. According to this view, a frame is an observer plus a coordinate lattice constructed to be an orthonormal right-handed set of space-like vectors perpendicular to a time-like vector. See Doran. This restricted view is not used here, and is not universally adopted even in discussions of relativity. In general relativity the use of general coordinate systems is common (see, for example, the Schwarzschild solution for the gravitational field outside an isolated sphere).
If we add the dimension of inertia to Newton’s “inertial” frame of reference then we get Einstein’s “Observational” frame of reference. The “speed of observer” represents the dimension of inertia. It is really the “drift velocity” that is an indicator of the inertia of the system that is drifting.
There are two types of observational reference frame: inertial and non-inertial. An inertial frame of reference is defined as one in which all laws of physics take on their simplest form. In special relativity these frames are related by Lorentz transformations, which are parametrized by rapidity. In Newtonian mechanics, a more restricted definition requires only that Newton’s first law holds true; that is, a Newtonian inertial frame is one in which a free particle travels in a straight line at constant speed, or is at rest. These frames are related by Galilean transformations. These relativistic and Newtonian transformations are expressed in spaces of general dimension in terms of representations of the Poincaré group and of the Galilean group.
The observational frame of reference acts as the “inertial” frame of reference that extends to different levels of inertia. A “non-inertial” frame then addresses the transition between different levels of inertia.
In contrast to the inertial frame, a non-inertial frame of reference is one in which fictitious forces must be invoked to explain observations. An example is an observational frame of reference centered at a point on the Earth’s surface. This frame of reference orbits around the center of the Earth, which introduces the fictitious forces known as the Coriolis force, centrifugal force, and gravitational force. (All of these forces including gravity disappear in a truly inertial reference frame, which is one of free-fall.)
The fictitious forces actually represent a change in inertia of the system that is accelerating.
A further aspect of a frame of reference is the role of the measurement apparatus (for example, clocks and rods) attached to the frame (see Norton quote above). This question is not addressed in this article, and is of particular interest in quantum mechanics, where the relation between observer and measurement is still under discussion (see measurement problem).
Space and time is influenced by the dimension of inertia. The problem of “clocks and rods” is handled when the dimension of inertia is explicitly added to the frame of reference.
In physics experiments, the frame of reference in which the laboratory measurement devices are at rest is usually referred to as the laboratory frame or simply “lab frame.” An example would be the frame in which the detectors for a particle accelerator are at rest. The lab frame in some experiments is an inertial frame, but it is not required to be (for example the laboratory on the surface of the Earth in many physics experiments is not inertial). In particle physics experiments, it is often useful to transform energies and momenta of particles from the lab frame where they are measured, to the center of momentum frame “COM frame” in which calculations are sometimes simplified, since potentially all kinetic energy still present in the COM frame may be used for making new particles.
The “lab frame” is the frame of reference in which the laboratory measurement devices are at rest. The “COM frame” is the center of momentum frame in which calculations are sometimes simplified.
In this connection it may be noted that the clocks and rods often used to describe observers’ measurement equipment in thought, in practice are replaced by a much more complicated and indirect metrology that is connected to the nature of the vacuum, and uses atomic clocks that operate according to the standard model and that must be corrected for gravitational time dilation. (See second, meter and kilogram).
In fact, Einstein felt that clocks and rods were merely expedient measuring devices and they should be replaced by more fundamental entities based upon, for example, atoms and molecules.
Einstein used clocks and rods to describe observers’ measurement equipment in thought. He felt that they should be replaced by more fundamental entities based upon, for example, atoms and molecules.
…
…
Frames of reference are especially important in special relativity, because when a frame of reference is moving at some significant fraction of the speed of light, then the flow of time in that frame does not necessarily apply in another frame. The speed of light is considered to be the only true constant between moving frames of reference.
It is important to note some assumptions made above about the various inertial frames of reference. Newton, for instance, employed universal time, as explained by the following example. Suppose that you own two clocks, which both tick at exactly the same rate. You synchronize them so that they both display exactly the same time. The two clocks are now separated and one clock is on a fast moving train, traveling at constant velocity towards the other. According to Newton, these two clocks will still tick at the same rate and will both show the same time. Newton says that the rate of time as measured in one frame of reference should be the same as the rate of time in another. That is, there exists a “universal” time and all other times in all other frames of reference will run at the same rate as this universal time irrespective of their position and velocity. This concept of time and simultaneity was later generalized by Einstein in his special theory of relativity (1905) where he developed transformations between inertial frames of reference based upon the universal nature of physical laws and their economy of expression (Lorentz transformations).
Newton’s ignores the changes in the inertia of an object due to changes in its “drift velocity” because such changes are infinitesimal in the material domain. Time is changed only by changes in inertia. Newton’s time is related to general level of inertia in the material domain. Einstein considered inertia and time beyond the material domain in the field domain.
It is also important to note that the definition of inertial reference frame can be extended beyond three-dimensional Euclidean space. Newton’s assumed a Euclidean space, but general relativity uses a more general geometry. As an example of why this is important, let us consider the geometry of an ellipsoid. In this geometry, a “free” particle is defined as one at rest or traveling at constant speed on a geodesic path. Two free particles may begin at the same point on the surface, traveling with the same constant speed in different directions. After a length of time, the two particles collide at the opposite side of the ellipsoid. Both “free” particles traveled with a constant speed, satisfying the definition that no forces were acting. No acceleration occurred and so Newton’s first law held true. This means that the particles were in inertial frames of reference. Since no forces were acting, it was the geometry of the situation which caused the two particles to meet each other again. In a similar way, it is now common to describe that we exist in a four-dimensional geometry known as spacetime. In this picture, the curvature of this 4D space is responsible for the way in which two bodies with mass are drawn together even if no forces are acting. This curvature of spacetime replaces the force known as gravity in Newtonian mechanics and special relativity.
Curvature of spacetime is one way of accounting for mass and gravity. The other way of accounting for it is through the property of inertia (substantive-ness of substance).
Here the relation between inertial and non-inertial observational frames of reference is considered. The basic difference between these frames is the need in non-inertial frames for fictitious forces, as described below.
…
When there is accelerated motion due to a force being exerted there is manifestation of inertia. If an electric car designed to recharge its battery system when decelerating is switched to braking, the batteries are recharged, illustrating the physical strength of manifestation of inertia. However, the manifestation of inertia does not prevent acceleration (or deceleration), for manifestation of inertia occurs in response to change in velocity due to a force. Seen from the perspective of a rotating frame of reference the manifestation of inertia appears to exert a force (either in centrifugal direction, or in a direction orthogonal to an object’s motion, the Coriolis effect).
…
Whereas, the inertial frames have constant level of inertia, the inertial frames have changing inertia.
.
The concept of field was conceived by Faraday. Faraday was an experimentalist and not a theorist. Based on extensive experimentation, Faraday boiled down the phenomena of electricity and magnetism to “lines of force” that originated from and terminated at material points. Faraday suggested that the lines of force acted as the medium for radiative phenomena, thus dispensing with the then popular idea of aether. This was the idea of the field. To Faraday, there was no “action at a distance.” The force between material bodies transmits through the field.
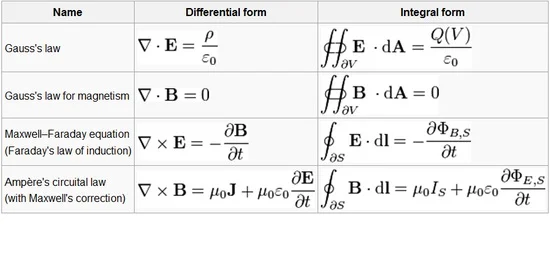
Maxwell supported the field idea. He also saw space not as something standalone but as a dimension of force. He saw Faraday’s approach to be compatible with the theory of potential from the mathematical discoveries of Laplace, Poisson, Green and Gauss. Thus he described the electromagnetic field-substance with the above four equations.
The Maxwell’s equations describe the dynamics within an electromagnetic cycle as follows:
Electromagnetic cycles of increasing frequency then form the spectrum of field-substance. An electromagnetic pulse propagates in field-space at a very high speed constrained only by its rate of formation. Maxwell showed this speed by the following relationship,
This speed is determined to be 3 x 108 m/s for light, which forms the visible part of the spectrum of field-substance.
Maxwell treated field-substance as something that spread out in three-dimensions as a continuous potential. In 1905, Einstein discovered that, at high frequencies, the field-substance acts as if it is made of particles (see Einstein’s 1905 Paper on Light Quanta). “Light quanta” were formed at higher frequencies. We know them today as “photons”. Einstein called this phenomenon quantization of light. Though deemed as particles, photons maintain continuity with each other through the background field.
Einstein’s discovery was the beginning of Quantum mechanics. It lead to the discovery of many more quantum particle. The phenomenon of quantization supports the hypothesis that field-substance provides the bridge between continuous space and discrete matter.
.
Parts from Wikipedia article are quoted in black. My comments follow in bold color italics.
An inertial frame of reference, in classical physics, is a frame of reference in which bodies, whose net force acting upon them is zero, are not accelerated, that is they are at rest or they move at a constant velocity in a straight line. In analytical terms, it is a frame of reference that describes time and space homogeneously, isotopically, and in a time-independent manner. Conceptually, in classical physics and special relativity, the physics of a system in an inertial frame have no causes external to the system. An inertial frame of reference may also be called an inertial reference frame, inertial frame, Galilean reference frame, or inertial space.
As described in the paper, The Electromagnetic Cycle, “The electromagnetic cycles collapse into a continuum of very high frequencies in our material domain, which provides the absolute and independent character to the space and time that we perceive.”
The “inertial frame of reference” of classical physics describes only the space and time occupied by matter. It does not describe the space and time that is not occupied by matter.
All inertial frames are in a state of constant, rectilinear motion with respect to one another; an accelerometer moving with any of them would detect zero acceleration. Measurements in one inertial frame can be converted to measurements in another by a simple transformation (the Galilean transformation in Newtonian physics and the Lorentz transformation in special relativity). In general relativity, in any region small enough for the curvature of spacetime and tidal forces to be negligible, one can find a set of inertial frames that approximately describe that region.
As described in the paper, The Problem of Inertia, “The uniform drift velocity results naturally from the innate acceleration of disturbance balanced by its inertia. The higher is the inertia, the smaller is the velocity. Matter may be looked upon as a “disturbance” of large inertia. Therefore, black holes of very large inertial mass shall have almost negligible velocity. On the other hand, bodies with little inertial mass shall have higher velocities.”
These inertial frames are valid for the material domain only. They are described by the Newton’s Laws of motion. The velocities in this domain are extremely small compared to the velocity of light. These material velocities are described in relation to each other by simple Galilean transformations. Acceleration applied to a body changes its velocity only for the duration of that acceleration. In the absence of acceleration the original velocity restores itself if the inertia of the body has not changed.
In a non-inertial reference frame in classical physics and special relativity, the physics of a system vary depending on the acceleration of that frame with respect to an inertial frame, and the usual physical forces must be supplemented by fictitious forces. In contrast, systems in non-inertial frames in general relativity don’t have external causes, because of the principle of geodesic motion. In classical physics, for example, a ball dropped towards the ground does not go exactly straight down because the Earth is rotating, which means the frame of reference of an observer on Earth is not inertial. The physics must account for the Coriolis effect—in this case thought of as a force—to predict the horizontal motion. Another example of such a fictitious force associated with rotating reference frames is the centrifugal effect, or centrifugal force.
An accelerating non-inertial frame is changing in inertia. Therefore, additionalforces appear in that frame to balance that additional inertia.
.
The motion of a body can only be described relative to something else—other bodies, observers, or a set of space-time coordinates. These are called frames of reference. If the coordinates are chosen badly, the laws of motion may be more complex than necessary. For example, suppose a free body that has no external forces acting on it is at rest at some instant. In many coordinate systems, it would begin to move at the next instant, even though there are no forces on it. However, a frame of reference can always be chosen in which it remains stationary. Similarly, if space is not described uniformly or time independently, a coordinate system could describe the simple flight of a free body in space as a complicated zig-zag in its coordinate system. Indeed, an intuitive summary of inertial frames can be given as: In an inertial reference frame, the laws of mechanics take their simplest form.
It is not true that the motion of a body can only be described relative to something else. A body’s absolute motion may be described in terms of its inertia. In the absence of externally applied forces, the velocities of two bodies differ because of difference in their inertia. The velocities become equal when the difference in inertia is balanced by externally applied forces.
The motion of any non-accelerating body may be chosen as a frame of reference. Another body with the same motion will appear at rest in this frame of reference. Such arbitrary frames of references provide fictitious motion on a relative basis. Absolute motion may be perceived only in a frame of zero inertia.
In an inertial frame, Newton’s first law, the law of inertia, is satisfied: Any free motion has a constant magnitude and direction. Newton’s second law for a particle takes the form…
All observers agree on the real forces, F; only non-inertial observers need fictitious forces. The laws of physics in the inertial frame are simpler because unnecessary forces are not present.
In an inertial frame, a body has no acceleration. Its absolute motion is determined by its inertia. Its apparent velocity and direction is determined by the frame of reference being used. The body is imparted acceleration by a force. The acceleration is proportional to the force applied. The proportionality constant is called the “mass” of the body.
The “mass” of the body is an aspect of its inertia. It shows how “pinned” the body is in space. We know from experience that any rotating motion pins a body in space. Therefore, the “mass” of a body may be looked upon as representing some rotating frame of reference.
In Newton’s time the fixed stars were invoked as a reference frame, supposedly at rest relative to absolute space. In reference frames that were either at rest with respect to the fixed stars or in uniform translation relative to these stars, Newton’s laws of motion were supposed to hold. In contrast, in frames accelerating with respect to the fixed stars, an important case being frames rotating relative to the fixed stars, the laws of motion did not hold in their simplest form, but had to be supplemented by the addition of fictitious forces, for example, the Coriolis force and the centrifugal force. Two interesting experiments were devised by Newton to demonstrate how these forces could be discovered, thereby revealing to an observer that they were not in an inertial frame: the example of the tension in the cord linking two spheres rotating about their center of gravity, and the example of the curvature of the surface of water in a rotating bucket. In both cases, application of Newton’s second law would not work for the rotating observer without invoking centrifugal and Coriolis forces to account for their observations (tension in the case of the spheres; parabolic water surface in the case of the rotating bucket).
The fixed stars represent a reference frame of infinite inertia. The absolute motion of such a reference frame is almost zero. An object with lesser inertia will be seen to be in motion in this reference frame. The lesser is the inertia of an object the greater shall be its motion. A rotating frame of reference shall also be rotating with respect to the fixed stars. In that rotating frame of reference there will be inertial forces that are not fictitious, but real, such as, parabolic water surface in the case of the rotating bucket.
As we now know, the fixed stars are not fixed. Those that reside in the Milky Way turn with the galaxy, exhibiting proper motions. Those that are outside our galaxy (such as nebulae once mistaken to be stars) participate in their own motion as well, partly due to expansion of the universe, and partly due to peculiar velocities. The Andromeda galaxy is on collision course with the Milky Way at a speed of 117 km/s. The concept of inertial frames of reference is no longer tied to either the fixed stars or to absolute space. Rather, the identification of an inertial frame is based upon the simplicity of the laws of physics in the frame. In particular, the absence of fictitious forces is their identifying property…
The identification of an inertial frame is based upon the absence of unexplained force or acceleration.
.
A brief comparison of inertial frames in special relativity and in Newtonian mechanics, and the role of absolute space is next.
According to the first postulate of special relativity, all physical laws take their simplest form in an inertial frame, and there exist multiple inertial frames interrelated by uniform translation:
The special principle of relativity seems to consider the inertial frames of references in material domain only.
This simplicity manifests in that inertial frames have self-contained physics without the need for external causes, while physics in non-inertial frames have external causes. The principle of simplicity can be used within Newtonian physics as well as in special relativity; see Nagel and also Blagojević.
Only the laws of mechanics have the same form in all inertial frames because they operate on a relative basis in the material domain (the continuum of very high frequencies).
In practical terms, the equivalence of inertial reference frames means that scientists within a box moving uniformly cannot determine their absolute velocity by any experiment (otherwise the differences would set up an absolute standard reference frame). According to this definition, supplemented with the constancy of the speed of light, inertial frames of reference transform among themselves according to the Poincaré group of symmetry transformations, of which the Lorentz transformations are a subgroup. In Newtonian mechanics, which can be viewed as a limiting case of special relativity in which the speed of light is infinite, inertial frames of reference are related by the Galilean group of symmetries.
Absolute motion shall be visible only in a frame of reference of zero inertia. Newtonian mechanics uses light as the reference point of “infinite velocity” for material domain. This is adequate except on cosmological scale where the finite speed of light generates anomalies. Special relativity accounts for the finite velocity of light and explains the cosmological anomalies. Special relativity is adequate except on atomic scale where the finite inertia of light generates anomalies.
Newton posited an absolute space considered well approximated by a frame of reference stationary relative to the fixed stars. An inertial frame was then one in uniform translation relative to absolute space. However, some scientists (called “relativists” by Mach), even at the time of Newton, felt that absolute space was a defect of the formulation, and should be replaced.
As explained in the paper, The Electromagnetic Cycle, space and time may be treated as absolute in the material domain only. The doubts entered only where cosmic dimensions were involved in which light’s finite velocity could not be ignored.
Indeed, the expression inertial frame of reference (German: Inertialsystem) was coined by Ludwig Lange in 1885, to replace Newton’s definitions of “absolute space and time” by a more operational definition. As translated by Iro, Lange proposed the following definition:
A discussion of Lange’s proposal can be found in Mach.
The inadequacy of the notion of “absolute space” in Newtonian mechanics is spelled out by Blagojević:
“Absolute space” is actually the reference frame of zero inertia. Newton approximated “absolute space” as the background of fixed stars. But fixed stars provide a reference frame of infinite inertia and not of zero inertia.
The utility of operational definitions was carried much further in the special theory of relativity. Some historical background including Lange’s definition is provided by DiSalle, who says in summary:
Inertial frames are frames of constant inertia. Acceleration is always related to change in inertia. The physicists have overlooked the concept of zero inertia
.
Within the realm of Newtonian mechanics, an inertial frame of reference, or inertial reference frame, is one in which Newton’s first law of motion is valid. However, the principle of special relativity generalizes the notion of inertial frame to include all physical laws, not simply Newton’s first law.
Newton viewed the first law as valid in any reference frame that is in uniform motion relative to the fixed stars; that is, neither rotating nor accelerating relative to the stars. Today the notion of “absolute space” is abandoned, and an inertial frame in the field of classical mechanics is defined as:
An inertial frame of reference has its true basis in zero inertia of EMPTINESS, and not in the infinite inertia of fixed stars.
Hence, with respect to an inertial frame, an object or body accelerates only when a physical force is applied, and (following Newton’s first law of motion), in the absence of a net force, a body at rest will remain at rest and a body in motion will continue to move uniformly—that is, in a straight line and at constant speed. Newtonian inertial frames transform among each other according to the Galilean group of symmetries.
In material domain, the level of inertia is so high that compared to it, the differences in inertia of material bodies, and its effect on their velocities can be ignored.
If this rule is interpreted as saying that straight-line motion is an indication of zero net force, the rule does not identify inertial reference frames because straight-line motion can be observed in a variety of frames. If the rule is interpreted as defining an inertial frame, then we have to be able to determine when zero net force is applied. The problem was summarized by Einstein:
The weakness here is the implicit assumption that the relative uniform motion remains constant in the absence of external forces. This assumption ignores the influence of inertia on motion.
There are several approaches to this issue. One approach is to argue that all real forces drop off with distance from their sources in a known manner, so we have only to be sure that a body is far enough away from all sources to ensure that no force is present. A possible issue with this approach is the historically long-lived view that the distant universe might affect matters (Mach’s principle). Another approach is to identify all real sources for real forces and account for them. A possible issue with this approach is that we might miss something, or account inappropriately for their influence, perhaps, again, due to Mach’s principle and an incomplete understanding of the universe. A third approach is to look at the way the forces transform when we shift reference frames. Fictitious forces, those that arise due to the acceleration of a frame, disappear in inertial frames, and have complicated rules of transformation in general cases. On the basis of universality of physical law and the request for frames where the laws are most simply expressed, inertial frames are distinguished by the absence of such fictitious forces…
A source of “force” is body’s inertia, from which the body cannot be separated. We cannot assume all inertial frames to have the same inertia.
.
Inertial and non-inertial reference frames can be distinguished by the absence or presence of fictitious forces, as explained shortly.
The presence of fictitious forces indicates the physical laws are not the simplest laws available so, in terms of the special principle of relativity, a frame where fictitious forces are present is not an inertial frame:
Bodies in non-inertial reference frames are subject to so-called fictitious forces (pseudo-forces); that is, forces that result from the acceleration of the reference frame itself and not from any physical force acting on the body. Examples of fictitious forces are the centrifugal force and the Coriolis force in rotating reference frames…
The “fictitious” forces are essentially due to the inertia of the reference frame. The influence of inertia can be fully accounted only in a frame of reference of zero inertia.
Inertial navigation systems used a cluster of gyroscopes and accelerometers to determine accelerations relative to inertial space. After a gyroscope is spun up in a particular orientation in inertial space, the law of conservation of angular momentum requires that it retain that orientation as long as no external forces are applied to it. Three orthogonal gyroscopes establish an inertial reference frame, and the accelerators measure acceleration relative to that frame. The accelerations, along with a clock, can then be used to calculate the change in position. Thus, inertial navigation is a form of dead reckoning that requires no external input, and therefore cannot be jammed by any external or internal signal source…
The “inertial space” is set by the orientation of spinning gyroscopes.
.
Classical mechanics, which includes relativity, assumes the equivalence of all inertial reference frames. Newtonian mechanics makes the additional assumptions of absolute space and absolute time. Given these two assumptions, the coordinates of the same event (a point in space and time) described in two inertial reference frames are related by a Galilean transformation…
Newtonian mechanics applies only to the material domain of very high inertia, where differences in the inertia of material bodies can be ignored.
Einstein’s theory of special relativity, like Newtonian mechanics, assumes the equivalence of all inertial reference frames, but makes an additional assumption, foreign to Newtonian mechanics, namely, that in free space light always is propagated with the speed of light c0, a defined value independent of its direction of propagation and its frequency, and also independent of the state of motion of the emitting body. This second assumption has been verified experimentally and leads to counter-intuitive deductions including:
These deductions are logical consequences of the stated assumptions, and are general properties of space-time, typically without regard to a consideration of properties pertaining to the structure of individual objects like atoms or stars, nor to the mechanisms of clocks…
From this perspective, the speed of light is only accidentally a property of light, and is rather a property of spacetime, a conversion factor between conventional time units (such as seconds) and length units (such as meters).
Incidentally, because of the limitations on speeds faster than the speed of light, notice that in a rotating frame of reference (which is a non-inertial frame, of course) stationarity is not possible at arbitrary distances because at large radius the object would move faster than the speed of light.
As described in the paper, The Electromagnetic Cycle, “The electromagnetic cycles collapse into a continuum of very high frequencies in our material domain, which provides the absolute and independent character to the space and time that we perceive.
“This is the Newtonian domain of space and time. Einsteinian length contraction and time dilation does not occur in this Newtonian domain. It occurs at much lower electromagnetic frequencies.”
Special relativity allows frames of references that are outside the material domain. The error is to consider them equivalent to those in material domain.
General relativity is based upon the principle of equivalence:
General relativity acknowledges inertia in the context of a field.
This idea was introduced in Einstein’s 1907 article “Principle of Relativity and Gravitation” and later developed in 1911. Support for this principle is found in the Eötvös experiment, which determines whether the ratio of inertial to gravitational mass is the same for all bodies, regardless of size or composition. To date no difference has been found to a few parts in 1011. For some discussion of the subtleties of the Eötvös experiment, such as the local mass distribution around the experimental site (including a quip about the mass of Eötvös himself), see Franklin.
Inertial and gravitational mass are equivalent.
Einstein’s general theory modifies the distinction between nominally “inertial” and “noninertial” effects by replacing special relativity’s “flat” Minkowski Space with a metric that produces non-zero curvature. In general relativity, the principle of inertia is replaced with the principle of geodesic motion, whereby objects move in a way dictated by the curvature of spacetime. As a consequence of this curvature, it is not a given in general relativity that inertial objects moving at a particular rate with respect to each other will continue to do so. This phenomenon of geodesic deviation means that inertial frames of reference do not exist globally as they do in Newtonian mechanics and special relativity.
The inertial frames of general relativity acknowledge the differences in their inertia and start to account for it.
However, the general theory reduces to the special theory over sufficiently small regions of spacetime, where curvature effects become less important and the earlier inertial frame arguments can come back into play. Consequently, modern special relativity is now sometimes described as only a “local theory”. The study of double-star systems provided significant insights into the shape of the space of the Milky Way galaxy. The astronomer Karl Schwarzschild observed the motion of pairs of stars orbiting each other. He found that the two orbits of the stars of such a system lie in a plane, and the perihelion of the orbits of the two stars remains pointing in the same direction with respect to the solar system. Schwarzschild pointed out that that was invariably seen: the direction of the angular momentum of all observed double star systems remains fixed with respect to the direction of the angular momentum of the Solar System. These observations allowed him to conclude that inertial frames inside the galaxy do not rotate with respect to one another, and that the space of the Milky Way is approximately Galilean or Minkowskian.
Special relativity uses light as its reference frame. This is different from a reference frame of zero inertia. This introduces an error that is carried forward into General relativity.
.
