
Reference: The Story of Philosophy
This paper presents Chapter VI, Immanuel Kant and German Idealism, Section 3 (part 2) from the book THE STORY OF PHILOSOPHY by WILL DURANT. The contents are from the 1933 reprint of this book by TIME INCORPORATED by arrangement with Simon and Schuster, Inc.
The paragraphs of the original material (in black) are accompanied by brief comments (in color) based on the present understanding. Feedback on these comments is appreciated.
The heading below is linked to the original materials.
.
Transcendental Analytic
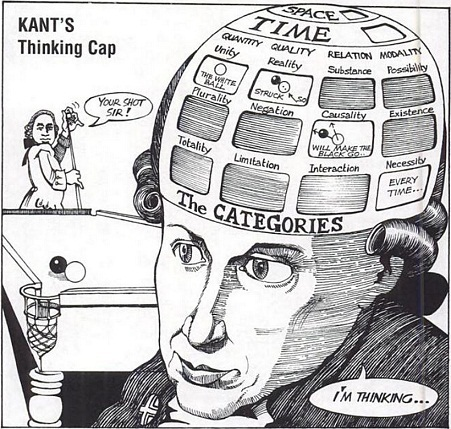
So we pass from the wide field of sensation and perception to the dark and narrow chamber of thought; from “transcendental esthetic” to “transcendental logic.” And first to the naming and analysis of those elements in our thought which are not so much given to the mind by perception as given to perception by the mind; those levers which raise the “perceptual” knowledge of objects into the “conceptual” knowledge of relationships, sequences, and laws; those tools of the mind which refine experience into science. Just as perceptions arranged sensations around objects in space and time, so conception arranges perceptions (objects and events) about the ideas of cause, unity, reciprocal relation, necessity, contingency, etc.; these and other “categories” are the structure into which perceptions are received, and by which they are classified and moulded into the ordered concepts of thought. These are the very essence and character of the mind; mind is the coordination of experience.
Perception comes about as the sensations are arranged around objects and events in space and time. Conception comes about as the perceptions are arranged around “categories,” such as, cause, unity, reciprocal relation, necessity, contingency, etc. Mind is the coordination of experience.
And here again observe the activity of this mind that was, to Locke and Hume, mere “passive wax” under the blows of sense-experience. Consider a system of thought like Aristotle’s; is it conceivable that this almost cosmic ordering of data should have come by the automatic, anarchistic spontaneity of the data themselves? See this magnificent card-catalogue in the library, intelligently ordered into sequence by human purpose. Then picture all these card-cases thrown upon the floor, all these cards scattered pell-mell into riotous disorder. Can you now conceive these scattered cards pulling themselves up, Munchausen-like, from their disarray, passing quietly into their alphabetical and topical places in their proper boxes, and each box into its fit place in the rack,–until all should be order and sense and purpose again? What a miracle-story these sceptics have given us after all!
Prior to Kant, it was assumed that the sensations arranged themselves into a remarkable order automatically somehow. No ordering agency was postulated.
Sensation is unorganized stimulus, perception is organized sensation, conception is organized perception, science is organized knowledge, wisdom is organized life: each is a greater degree of order, and sequence, and unity. Whence this order, this sequence, this unity? Not from the things themselves; for they are known to us only by sensations that come through a thousand channels at once in disorderly multitude; it is our purpose that put order and sequence and unity upon this importunate lawlessness; it is ourselves, our personalities, our minds, that bring light upon these seas. Locke was wrong when he said, “There is nothing in the intellect except what was first in the senses”; Leibnitz was right when he added,–“nothing, except the intellect itself.” “Perceptions without conceptions,” says Kant, “are blind.” If perceptions wove themselves automatically into ordered thought, if mind were not an active effort hammering out order from chaos, how could the same experience leave one man mediocre, and in a more active and tireless soul be raised to the light of wisdom and the beautiful logic of truth?
Sensation is unorganized stimulus, perception is organized sensation, conception is organized perception, science is organized knowledge, wisdom is organized life: each is a greater degree of order, and sequence, and unity. There has to be some agency to bring this order about.
The world, then, has order, not of itself, but because the thought that knows the world is itself an ordering, the first stage in that classification of experience which at last is science and philosophy. The laws of thought are also the laws of things, for things are known to us only through this thought that must obey these laws, since it and they are one; in effect, as Hegel was to say, the laws of logic and the laws of nature are one, and logic and metaphysics merge. The generalized principles of science are necessary because they are ultimately laws of thought that are involved and presupposed in every experience, past, present, and to come. Science is absolute, and truth is everlasting.
There is thought that knows the world is itself an ordering. It orders itself from sensations into perceptions, conceptions, science and philosophy. The laws of thought underlie all things. The universe is a conscious, living thing.
.
Final Comments
There are laws of thought that order sensations into perceptions, conceptions, science and philosophy. These laws lie deep into the core of all things and influence them through all stage of their evolution.
Subject clearing identifies these laws to be emerging from the Principle of Oneness. The Principle of Oneness, which was described in the previous section, also gives us the ideal scene for logic, because its violation gives us anomalies, such as, discontinuity (missing data), inconsistency (contradictory data), or disharmony (arbitrary data).
.
